
Insights from the hub-to-hub application
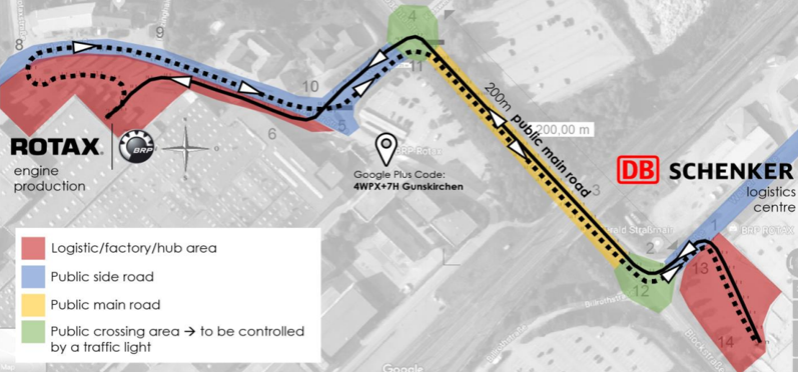
During the three-month test operation, the automated and electrically powered vehicle drove on a route of 600 meters between the BRP-ROTAX and DB Schenker premises in Gunskirchen. The route included the respective factory premises, public secondary and main roads as well as busy intersections. In order to safely coordinate the automated test operation and normal traffic, two intelligent traffic lights were installed here.
The automated vehicle traveled the route mainly in September 2023 for 23 days. It managed the entire route largely independently. The safety driver was only necessary in exceptional cases.
The hub-to-hub use case provided insights into the real use of autonomous freight vehicles.
Integration of automated freight vehicles into existing traffic is a challenge
The newly installed traffic lights made it easier for automated vehicles to enter intersections, but initially led to long waiting times for other road users in the intersection area. During the course of the test operation, the traffic light switching and the position of the automated vehicle were increasingly coordinated with each other through communication via intelligent traffic systems (C-ITS). The red phases could be increasingly shortened.
Another challenge was driving on the main road between the “hubs”. A maximum speed of 60 km/h applies on this section of the route, while the vehicle was limited to a speed of 20 km/h in automated mode. This can lead to the formation of columns.
With technical adjustments for fewer braking processes and greater efficiency
The automated vehicle used is powered fully electrically. Previous research has shown that under ideal conditions, energy consumption when operating vehicles automatically can be reduced by up to 20 percent compared to manual operation. In the case of the hub-to-hub use case, however, the energy requirement of automated driving was higher than with human drivers. This is due to the relatively more frequent braking maneuvers. These occurred 11 times as often during the use case in Gunskirchen compared to human drivers. After braking, every time the heavy truck starts up again, the energy consumption increases.
The vehicle's frequent stops are largely due to the very sensitive object detection and not completely up-to-date navigation data. This also explains that 17% of the total driving time involved manual assistance from the safety driver.
From hub-to-hub to teleoperation application
After the tests in real operation, the vehicle used in Gunskirchen was moved back to the Digitrans test center for automated driving in St. Valentin. There, the operation of the truck was demonstrated and tested using teleoperation (supporting the automated vehicle from a distance). The underlying application scenario of teleoperation is that the vehicle is automated and travels without a safety driver. In the event of complex situations, the vehicle should automatically request and receive remote assistance from a human teleoperator. In St. Valentin, for example, driving around an obstacle using remote support was tested.
Potentials and challenges
The preliminary results show the potential of automated freight vehicles, but also the challenges that must be overcome for the further development of automated freight transport.
The findings from the hub-to-hub use case are currently being evaluated in a structured manner. The vehicle, software, sensors and their interaction as well as the legal framework for real operation are considered. The “Automated Mobility” team at AustriaTech analyzes these and, based on this, formulates suggestions for further legal design as part of the AWARD project. Digitrans GmbH, as a competence center for the future of autonomous transport, is planning further projects for the safe integration of automated freight vehicles into public transport in the next few years.
The complete evaluation of the results of the hub-to-hub use case is expected to be available on the AWARD project homepage by the end of the year .
About the AWARD project
During the project period from January 2021 to June 2024, 28 partners from twelve countries will work together under the consortium management of easymile in the AWARD (“All Weather Autonomous Real logistics operations and Demonstrations”) project to make autonomous transport vehicles for logistics applications suitable for all-weather applications and therefore more widely usable . For this purpose, application examples are being implemented at Oslo Airport, in the port near Rotterdam, at the AIT Austrian Institute of Technology in Seibersdorf as well as at BRP-Rotax and DB Schenker in Gunskirchen. AWARD is funded as part of the European research and innovation funding program HORIZON 2020.